2006 - 2010
Doutorado em Engenharia Informática.
Faculdade de Engenharia da Universidade do Porto, FEUP, Portugal
Título: Plataforma de desenvolvimento de
cadeiras de rodas inteligentes
Orientador: Luis Paulo Gonçalves Reis
Bolsista do(a): Coordenação de Aperfeiçoamento de Pessoal de
Nível Superior
Resumo:
Nos últimos anos, a quantidade de indivíduos idosos tem
aumentado significativamente e pensa-se que o envelhecimento
social é cada vez maior. Para muitos destes indivíduos, o
envelhecimento traz consigo dificuldades na mobilidade, o que
afecta sensivelmente a sua qualidade de vida e sua
independência. Paralelamente, o aumento das actividades sociais
voltadas para indivíduos com mobilidade reduzida, cada vez mais,
revela a inadequação e a insuficiência funcional dos
equipamentos actuais direccionados para este grupo de
indivíduos, sobretudo, para aqueles com níveis mais elevados de
necessidade. Outro problema que se revela neste contexto é a
insuficiência de profissionais da saúde responsáveis por zelar e
promover o bem-estar social a estes grupos de indivíduos.
Embora as dificuldades de mobilidade dos idosos e deficientes
possam ser diminuídas com o uso de Cadeiras de Rodas
tradicionais, manuais ou motorizadas, em alguns casos, a sua
utilização de forma independente ainda é um desafio. O
desenvolvimento de novas tecnologias, que proporcionem maior
segurança e comodidade a estes indivíduos, é um problema
científico (mobilizando cientistas de diversas áreas do
conhecimento) e social (mobilizando políticos e empresários).
Nos últimos anos, robôs móveis, autónomos, do tipo Cadeira de
Rodas Inteligentes (CRIs) têm sido estudados e desenvolvidos
para aplicações em hospitais ou em residências, com o objectivo
de proporcionarem maior bem-estar e independência para
indivíduos idosos e/ou indivíduos com mobilidade reduzida.
Este trabalho aborda o estudo, projecto e implementação de uma
plataforma de desenvolvimento de CRI, que permita facilitar o
desenvolvimento de sistemas sensoriais e de actuação, de novas
metodologias de navegação e planeamento inteligente voltados
para as CRI.
O trabalho propõe uma estrutura genérica e modular para o
desenvolvimento de CRI baseada em Sistemas Multi-Agente (SMA).
Relativamente ao SMA desenvolvido, destaca-se a aplicação dos
conceitos de micro agente e macro agente. Assim, cada CRI
representa um macro agente no SMA global, interagindo com outros
agentes (outras CRI, Agente Porta,
Agente Assistente, entre outros). No entanto, internamente, cada
CRI é um SMA formado pelo agrupamento de diversos módulos
distribuídos em agentes autónomos – micro agentes.
A plataforma de comunicação de SMA para robôs móveis reais
implementada baseia-se num conceito de cooperação entre os
agentes para manter a organização do sistema de comunicação,
reforçando a constante preocupação com aspectos de segurança
crítica no sistema de comunicação.
Outro conceito proposto é a aplicação de interface multimodal,
flexível, que permita uma interacção mais natural entre o
utilizador e a CRI através de sequências de diferentes inputs do
utilizador para comandar a cadeira.
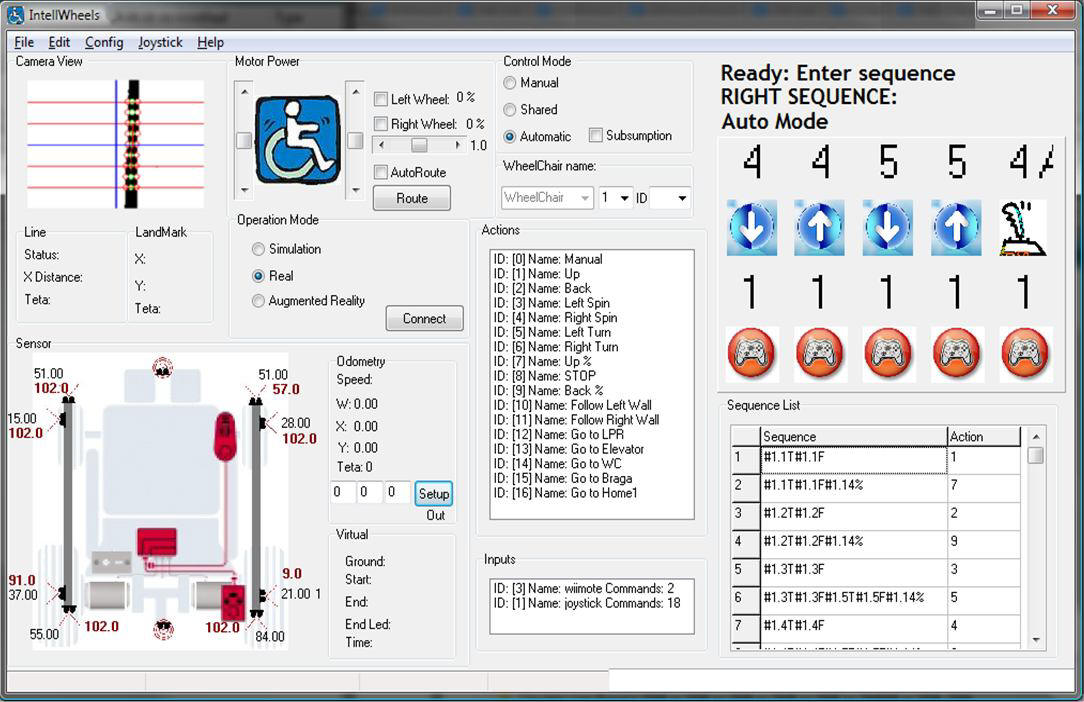
O conceito de Realidade Mista aplicado ao simulador IntellWheels
desenvolvido permite testar a CRI em ambientes mais complexos e
próximos daqueles que os seus utilizadores enfrentarão no mundo
real, de uma forma mais segura e económica. Outra utilização
possível para a Realidade Mista é na reabilitação de pacientes.
Esta característica distingue o simulador IntellWheels dos
demais existentes, uma vez que a maioria dos simuladores
aplicados a esta área não explora este conceito.
No decurso do trabalho foram desenvolvidos três protótipos reais
revelando os aperfeiçoamentos da plataforma de hardware, bem
como a melhoria do software de controlo e restantes módulos.
Testes e experiências realizadas com o protótipo real de CRI e
apresentados nesta tese permitiram validar a plataforma
IntellWheels, tanto em termos do funcionamento integrado de seus
módulos, bem como da sua integração com outras CRI e outros
macro agentes. A análise dos resultados permite mostrar a
aplicabilidade e eficácia da abordagem proposta e,
consequentemente, da plataforma desenvolvida.

Fonte: Tese Dr. Rodrigo Braga - FEUP/PT
Maiores detalhes sobre este Projeto
1999 - 2001
Mestrado em Engenharia Elétrica.
Pontifícia Universidade Católica do Rio Grande do Sul, PUCRS,
Porto Alegre, Brasil
Título: Filtros Ativos, Híbridos de Potência
Orientador: Fausto Bastos Líbano
Bolsista do(a): Coordenação de Aperfeiçoamento de Pessoal de
Nível Superior
Resumo:
1994 - 1998
Graduação em Engenharia de Controle e Automação.
Pontifícia Universidade Católica do Rio Grande do Sul, PUCRS,
Porto Alegre, Brasil
Título: Retrofiting de uma furadeira de
bancada industrial
Orientador: Fausto Bastos Líbano

